The past couple of weeks have been focusing primarily on the software, electronics, and documentation. I don’t currently have pictures of my progress, but I will take and upload some as soon as possible.
Software:
The software is coming along nicely. I finally got a working vectored thrust algorithm written and much of the Python code is in place. The software is available on GitHub https://github.com/Kristian-Charboneau/KARR. Since the python code will be handling the vectored thrust calculations and get sensor data directly through the Raspberry Pi’s GPIO the micro-controller code will be much simpler. The micro-controller will basically be a serial controlled PWM generator (for the motor controllers and lights).
Electronics:
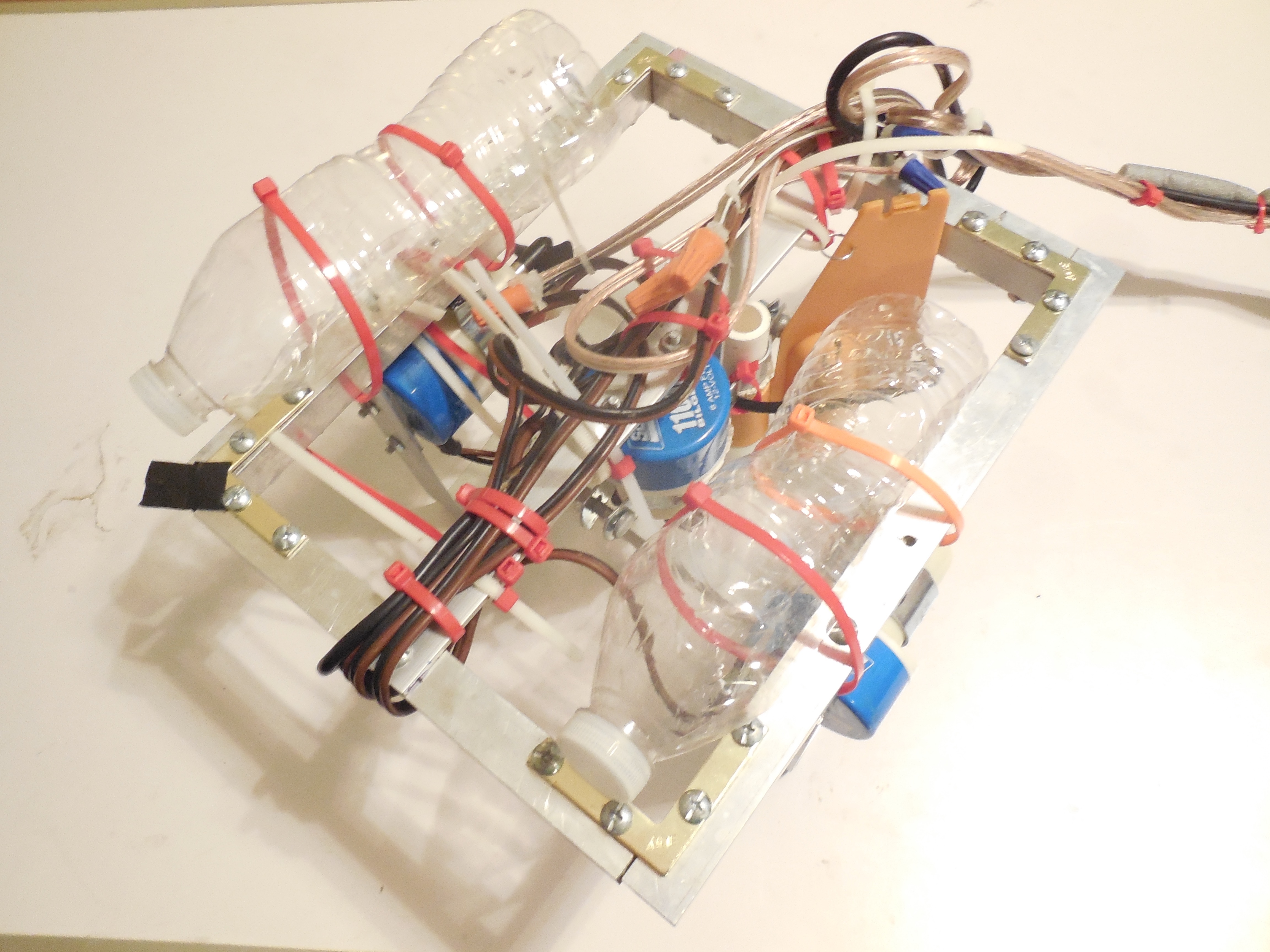
Building the electronics has been dragging out longer than expected, but is finally nearing an end. The trays for each hull are built and mostly populated with components. I finished testing the power control circuitry today, and thankfully it works as expected. The system uses a magnetic switch for controlling power. This allows the ROV to be turned on or off without having to open up the hull. It is based around the Adafruit push button power switch breakout and a magnetic switch from a door open/close sensor. The sensor is sensitive enough that the magnet can be a quarter inch away (the thickness of the hull) and still be detected. Note that the magnet doesn’t have to be next to the sensor during runtime. The power switch breakout is designed for momentary switches, so the magnet simply has to be held near the sensor until the system turns on, then it can be taken away. The procedure is the same for turning the system off.
Misc.
I have been trying to decide what to use for the documentation. I basically have two main requirements: 1. It needs to be easy to change as the project changes (and play well with version control) 2. I need to be able to publish it in a single document form, like a PDF for instance. I would really like to use markdown for the source files, as it is easy to write with and works well with version control (especially GitHub). The main issue so far is converting it to pdf. At this point it seems a bash script utilizing cat and Pandoc may be the best option for converting the markdown files into a single pdf. With this in mind I think I will use GitHub wiki for managing the project’s documentation. It consists of markdown files and is its own git repository, allowing for version control. I’ll probably end up writing a bash or python script to “build” the markdown files into a pdf.
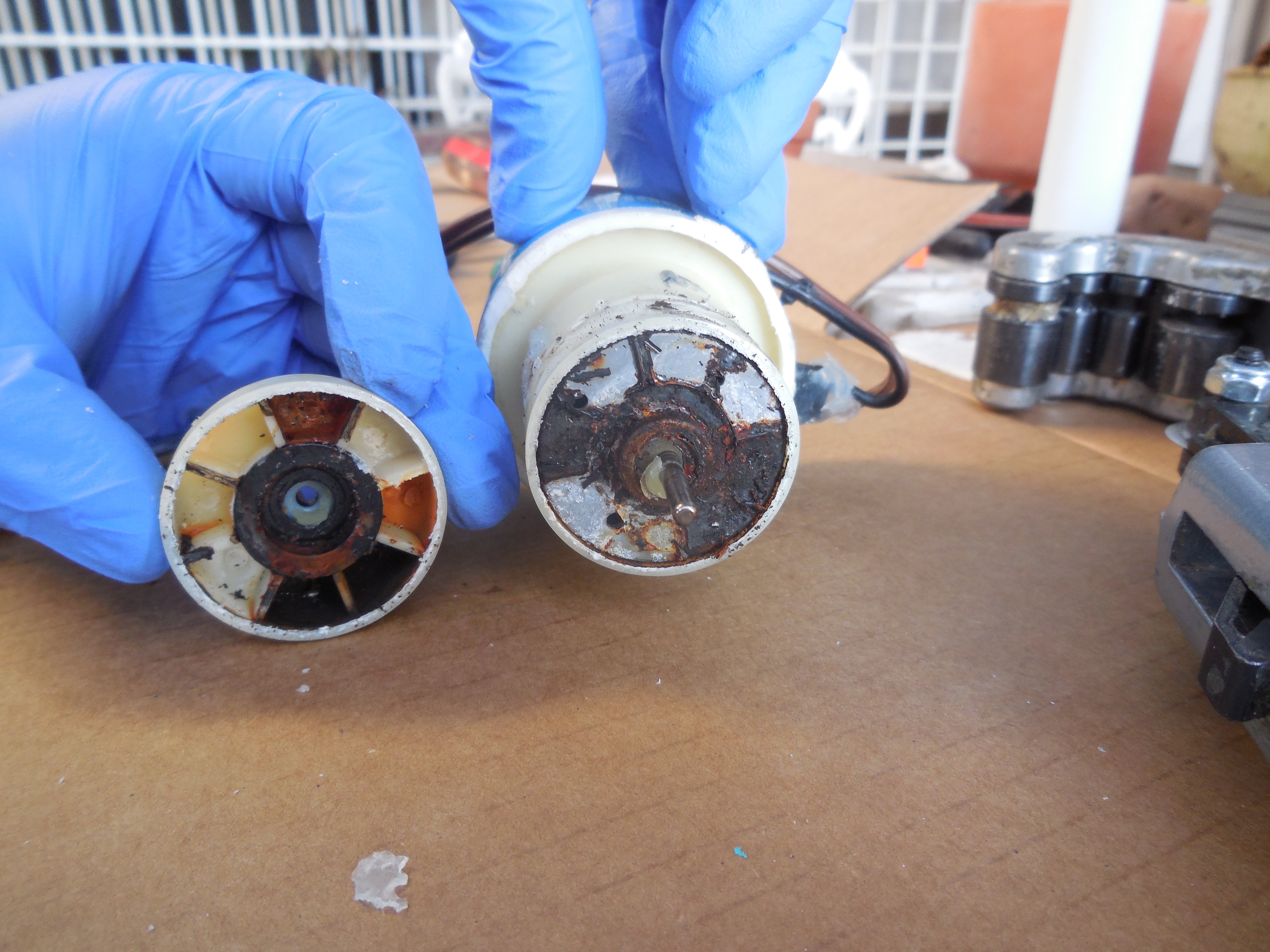
In addition to electronics and software the frame and thrusters have also gotten some attention. Since some of the thrusters I was going to use were rusted inside (though surprisingly still sorta work) I purchased three new bilge pumps. Unfortunately these new pumps are slightly different (same gph, different manufacturer and dimensions), so it remains to be seen how they compare to the other thrusters. Since these new motors are slightly longer the motor mounts I had from a previous rov won’t work, meaning I’ll have to build some new ones. Other than this the motors are ready to go.
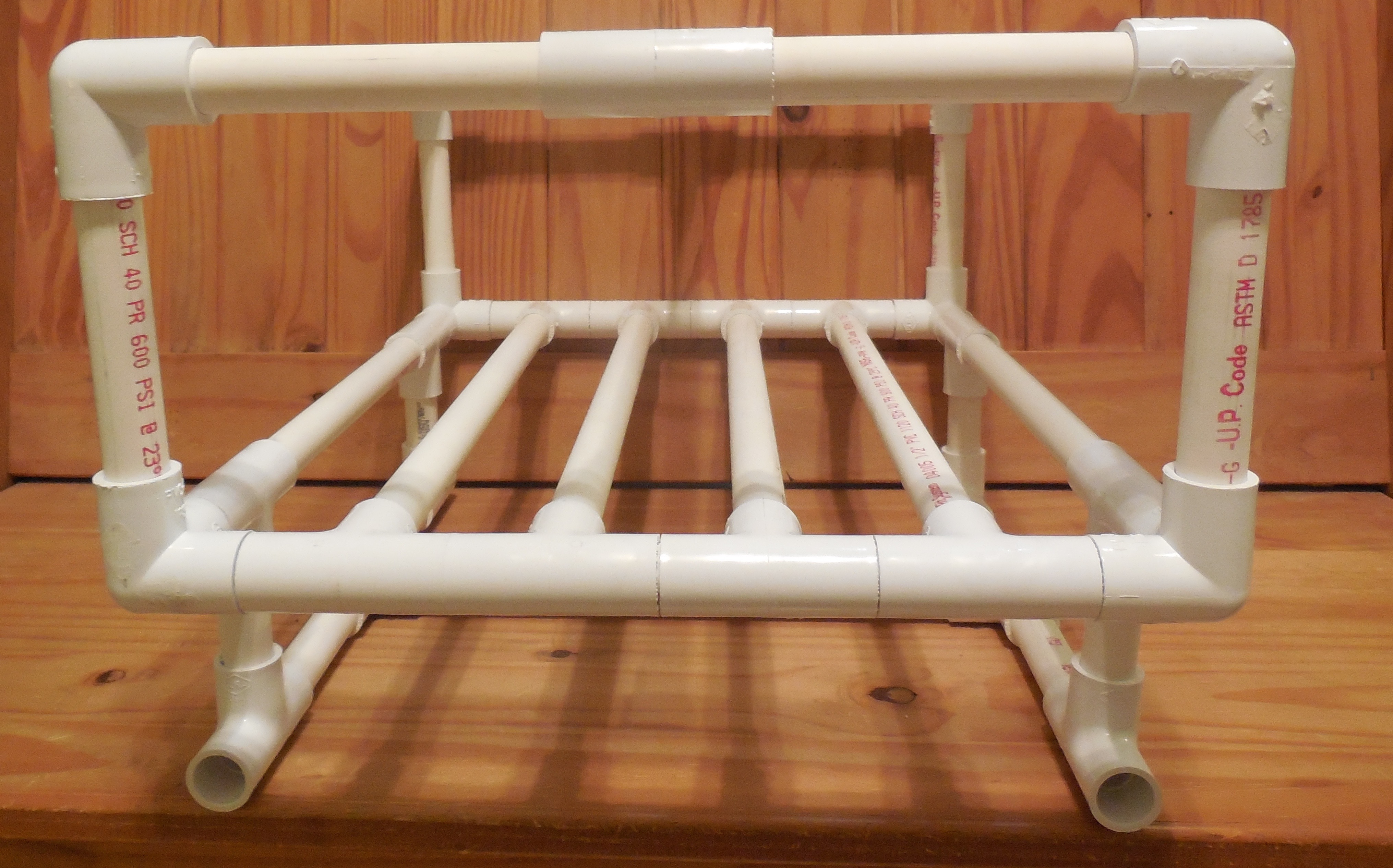
As far as the frame goes it is also pretty much done. To prevent scratches and scuffs I added heat shrink tube to the pipes that support the hulls. I still need to decide what I’ll use to secure the hulls, but otherwise the frame is good to go.