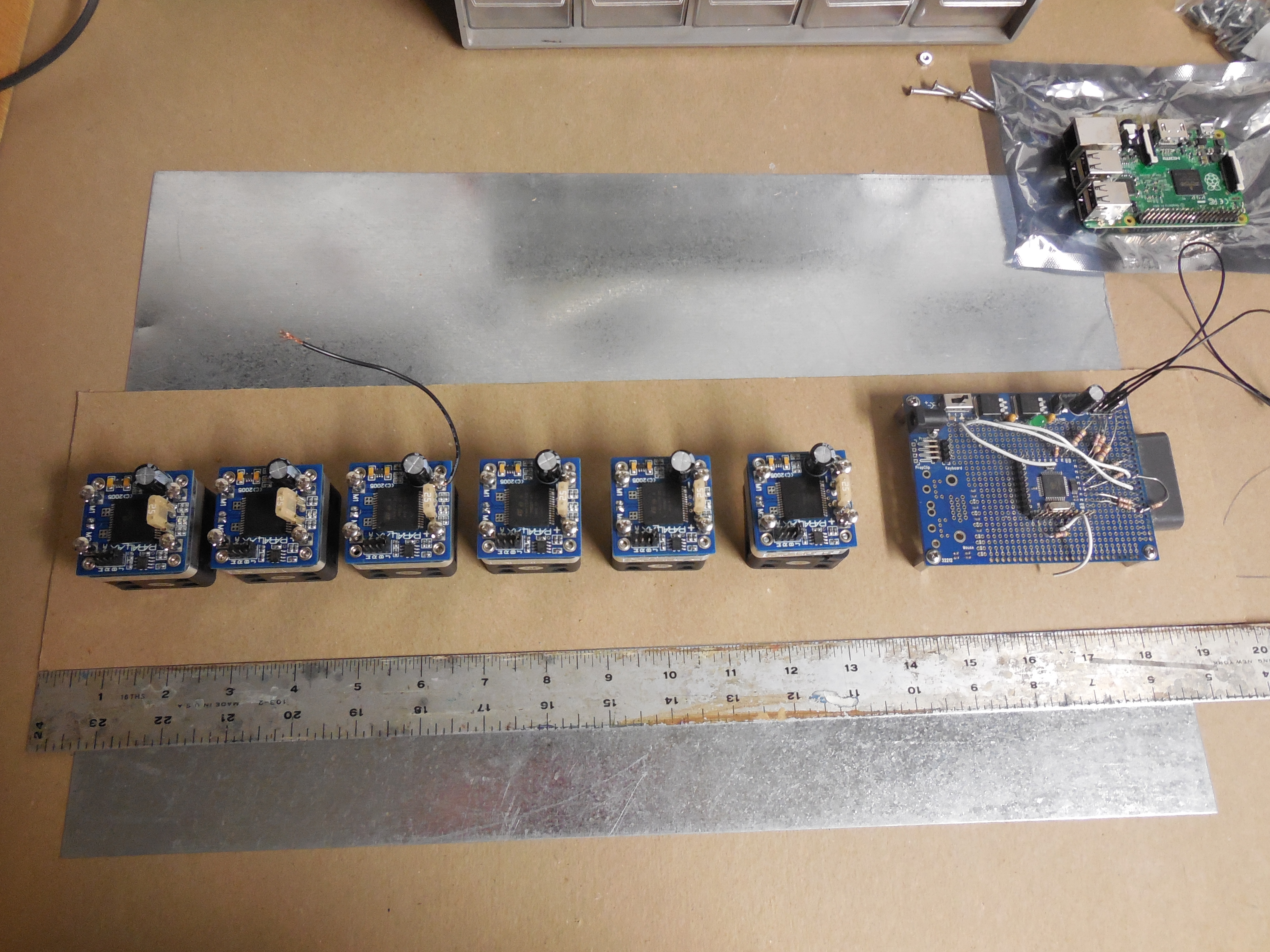
These first two weeks have primarily been sourcing parts and refining ideas. So far I have most of the major electronic components and an assortment of mechanical parts. All of the HB-25 motor controllers from Parallax have arrived, along with a Raspberry Pi 2 and inertial measurement sensor from Adafruit. I also have an assortment of aluminum for the frame and Lexan for various assemblies. I have six thrusters left over from previous projects and three un-modified bilge pumps. While I still need to build shrouds for all eight thrusters, at least I have a pretty good idea of how they will be constructed.
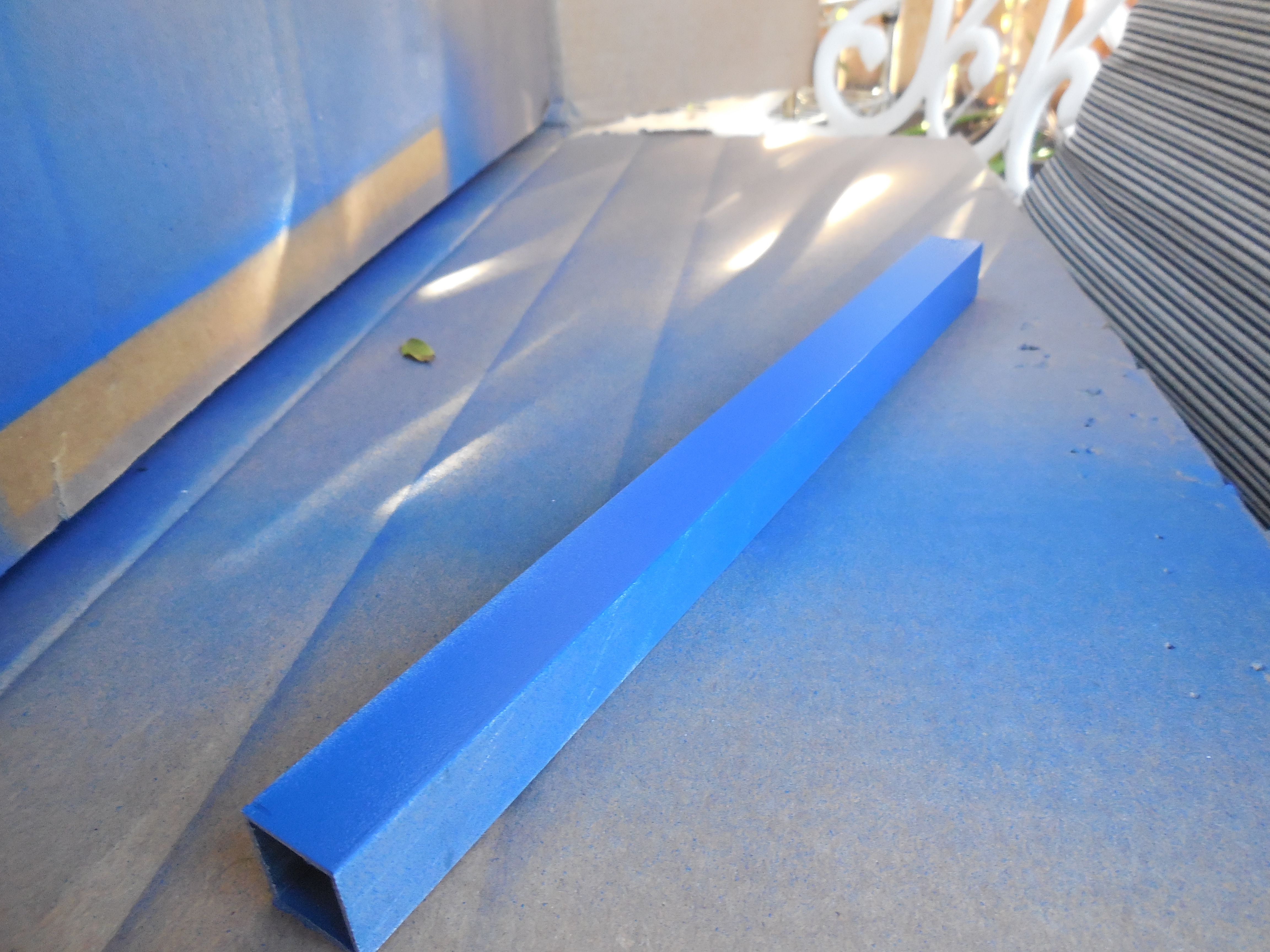
Labor Day provided a great opportunity to start working on the ROV. I spent a couple of hours tidying up the workshop and then got to work. I started the day out by painting some aluminum. It’s just a short piece of scrap to test how well the spray paint looks and adheres. I chose a slightly dark blue for the hull and thrusters and a dark grey for the frame.
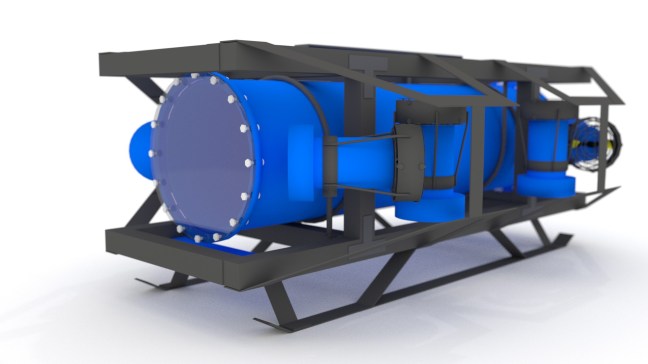
Next I cut out a 20″ x 4.75″ piece of thin cardboard to serve as a guide for laying out the internal components. The hull that the electronics will go in is 5″ in diameter by 24″ long. The wall thickness will hopefully be 1/8″ thick. This means the usable diameter is 4.75″ or so.
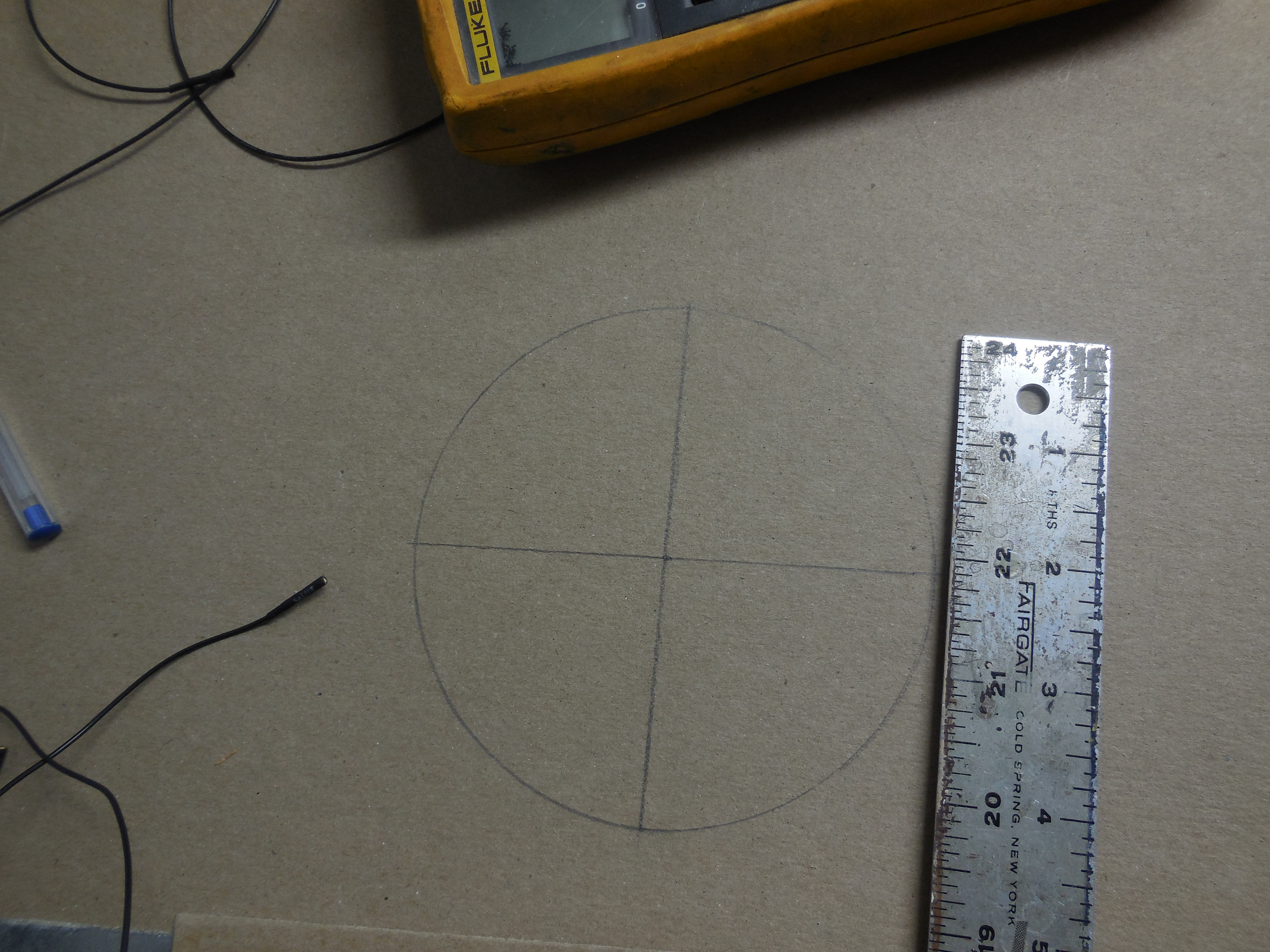
I also drew a circle on my workbench so I could see if the components, especially the HB-25s would fit. So far everything seems like it will, though it may be tight. It is important to note that the batteries will not be going in the main hull. I will either route power thru the tether or use a separate waterproof compartment on the rov to house the batteries.
To reduce the height of the motor drivers I am planning on removing their fans. Of course, when modifying the thermal management portion of a device one must be careful that the device doesn’t overheat. A poor thermal design could end up damaging the motor drivers. Since I don’t know how much heat one of these will produce under load, I decided to do a simple test to get a rough idea how the driver will perform under minimum load. I removed the fan from one of the HB-25s and connected it up to two bilge pumps in parallel. This is similar to the setup on the finished rov. Fortunately the HB-25’s heat sink did not feel noticeably warm (which is what I expected). At a later time I will test the drivers with more load and for a longer period of time, and see how much heat is generated (in addition to more detailed values, i.e. voltage and current within the system). The plan is to put the HB-25s in their own watertight container filled with mineral oil. This will help protect them in case water were to leak into the hull and hopefully help draw heat away from the drivers.
Now that I have a fairly good idea of how the electronics will be arranged inside the hull I can go ahead and purchase some aluminum tube. Over the next couple of weeks I will focus on assembling the electronics so I can begin writing software and building the frame and thrusters.
