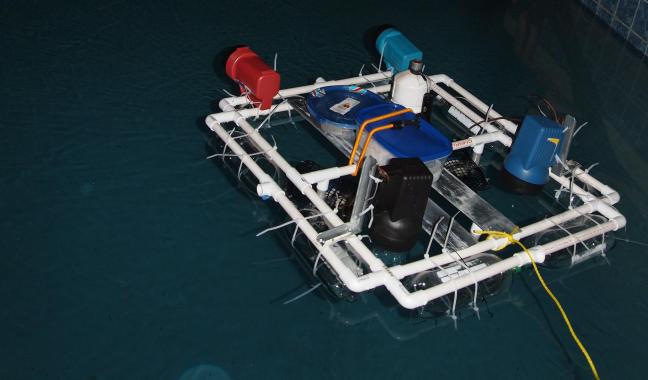
Surveyor 1 was built as a helper robot for determination. Surveyor 1 doesn’t submerge, instead it drives along the surface and provides additional lighting and a top-down view of determination. It is rather large for it’s purpose, however that is because we were originally going to put a vertical inverted lift system on the bottom and the top of Surveyor 1 was going to house the power and electronics for Determination (for more info on that see this article). The lift system would have contained a camera and manipulator, allowing Surveyor 1 to interact with objects below the surface up to about 13 feet deep. With this design Surveyor 1 needed a fairly large footprint for stability. Unfortunately the lifter and all-in-one control system plans didn’t quite work out, but we decided to leave the ROV how it was rather than rebuilding it.

This page is still under construction. In the mean time you can check out the tech report here for more information.
